
La fotogrametría con dron se ha convertido en una herramienta habitual en topografía, medio ambiente, jardinería técnica, obra civil e inspecciones. Consiste, en esencia, en obtener un modelo tridimensional o una ortofoto precisa a partir de muchas fotografías aéreas solapadas. No es magia ni requiere equipos extremadamente caros, pero sí método. La clave no está solo en el software, sino en planificar bien el vuelo y mantener criterios técnicos coherentes desde el principio hasta el final del procesado.
La combinación de Dronelink para la planificación automática de vuelos y Pix4D para el procesado posterior es una de las más sólidas a nivel profesional. Dronelink permite diseñar misiones repetibles con control preciso de parámetros, mientras que Pix4D ofrece motores de cálculo robustos para generar ortomosaicos, modelos digitales de terreno y nubes de puntos con precisión métrica.
Requisitos previos
Antes de empezar, conviene asumir que la fotogrametría exige cierta base técnica y un equipo mínimo adecuado. El dron, idealmente de la gama DJI o similar, debe disponer de buena estabilidad GPS y cámara de calidad decente. No es imprescindible que sea un modelo industrial, pero sí que permita control manual de cámara y misiones automatizadas. También es importante contar con varias baterías y tarjetas de memoria rápidas, porque los vuelos generan muchas imágenes.
En cuanto al ordenador, el procesado es lo más exigente del flujo de trabajo. Con menos de 16 GB de RAM se puede trabajar, pero será lento e inestable. A partir de 32 GB y una GPU dedicada la experiencia mejora notablemente. El almacenamiento SSD también marca diferencia.
A nivel de software, se necesita:
- Dronelink para diseñar la misión.
- Pix4Dmapper o Pix4Dmatic para procesar.
- Firmware del dron y controladora actualizados.
Conceptos básicos antes de volar
La mayoría de errores en fotogrametría no se producen en el ordenador, sino en el aire. Hay cuatro conceptos que determinan el resultado final:
Solape frontal y lateral.
Las imágenes deben superponerse entre sí. Un valor típico profesional es 80 % frontal y 70 % lateral. Menos solape implica huecos o modelos defectuosos; más solape aumenta el tiempo de vuelo pero da mayor robustez.
Altura de vuelo.
Define el nivel de detalle. A menor altura, mayor resolución, pero más fotos y más tiempo de procesado. No siempre conviene volar bajo; depende del objetivo del proyecto.
GSD (Ground Sample Distance).
Es el tamaño real que representa cada píxel. Un GSD de 2 cm significa que cada píxel equivale a 2 cm en el terreno. Para jardinería técnica o levantamientos pequeños puede ser ideal; para superficies grandes quizá sea excesivo.
Velocidad e iluminación.
Volar demasiado rápido genera desenfoque. El viento también perjudica. La luz dura produce sombras agresivas que dificultan el cálculo. Los días ligeramente nublados suelen ser los mejores.
Resumen: si el vuelo es malo, el software no lo arregla.
Planificación de misión en Dronelink
Dronelink destaca por su capacidad de automatizar trayectorias con precisión. El proceso comienza creando un proyecto y seleccionando una misión de tipo Mapping o Grid. Se dibuja un polígono sobre el área a cubrir y se definen los parámetros.
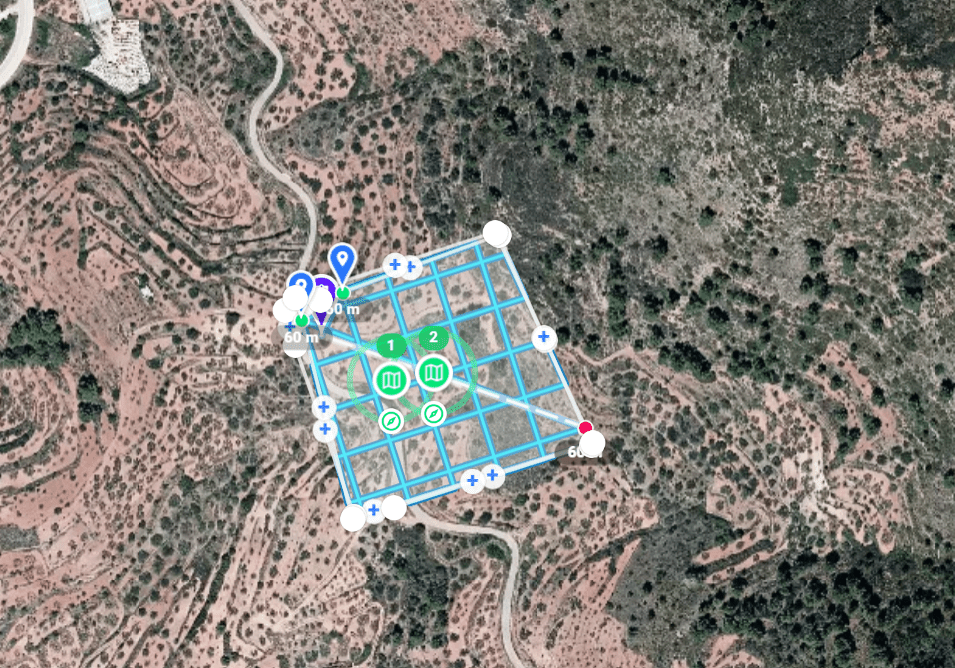
La cámara debe ir en nadir (–90°) para ortofoto clásica. La altura de vuelo suele situarse entre 60 y 120 metros, aunque depende del detalle buscado. Un solape del 80/70 es un estándar fiable. La velocidad recomendada oscila entre 3 y 6 m/s; más rápido es arriesgar nitidez.
Conviene también fijar la cámara en modo manual, con ISO bajo y velocidad de obturación alta. El formato RAW ofrece más calidad, pero genera archivos pesados; JPEG de alta calidad suele ser suficiente para muchos trabajos técnicos.
Antes de despegar, hay que verificar batería, señal GPS, estado de sensores y permisos de vuelo. Este paso evita sustos innecesarios.
Ejecución del vuelo
Durante la misión, el piloto pasa a ser supervisor. El despegue puede hacerse manual y luego activar la misión automática. Lo importante es no interferir con los controles salvo emergencia. Hay que vigilar cobertura GPS, viento y nivel de batería.
Un buen hábito es revisar rápidamente las primeras fotos: si salen borrosas o mal expuestas, es mejor abortar y corregir. Continuar un vuelo defectuoso solo multiplica problemas.
Organización de imágenes
Una vez en tierra, la disciplina digital es fundamental. Las fotos deben copiarse a una carpeta exclusiva del proyecto, sin mezclarlas con otros vuelos. Es recomendable eliminar imágenes claramente movidas o defectuosas antes de procesar. Esta limpieza reduce errores y tiempos de cálculo.
Procesado en Pix4D
El procesado comienza creando un nuevo proyecto e importando las imágenes. Es vital seleccionar correctamente el sistema de coordenadas (por ejemplo UTM zona correspondiente). Un error aquí arruina la georreferenciación.
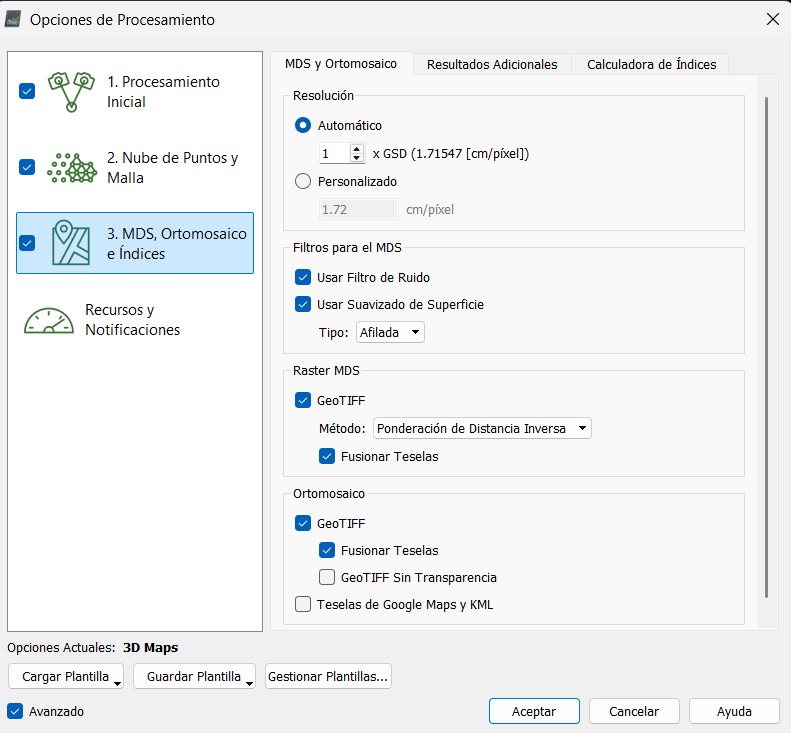
Pix4D ofrece plantillas según el tipo de proyecto, pero el flujo general siempre pasa por tres fases:
- Initial Processing.
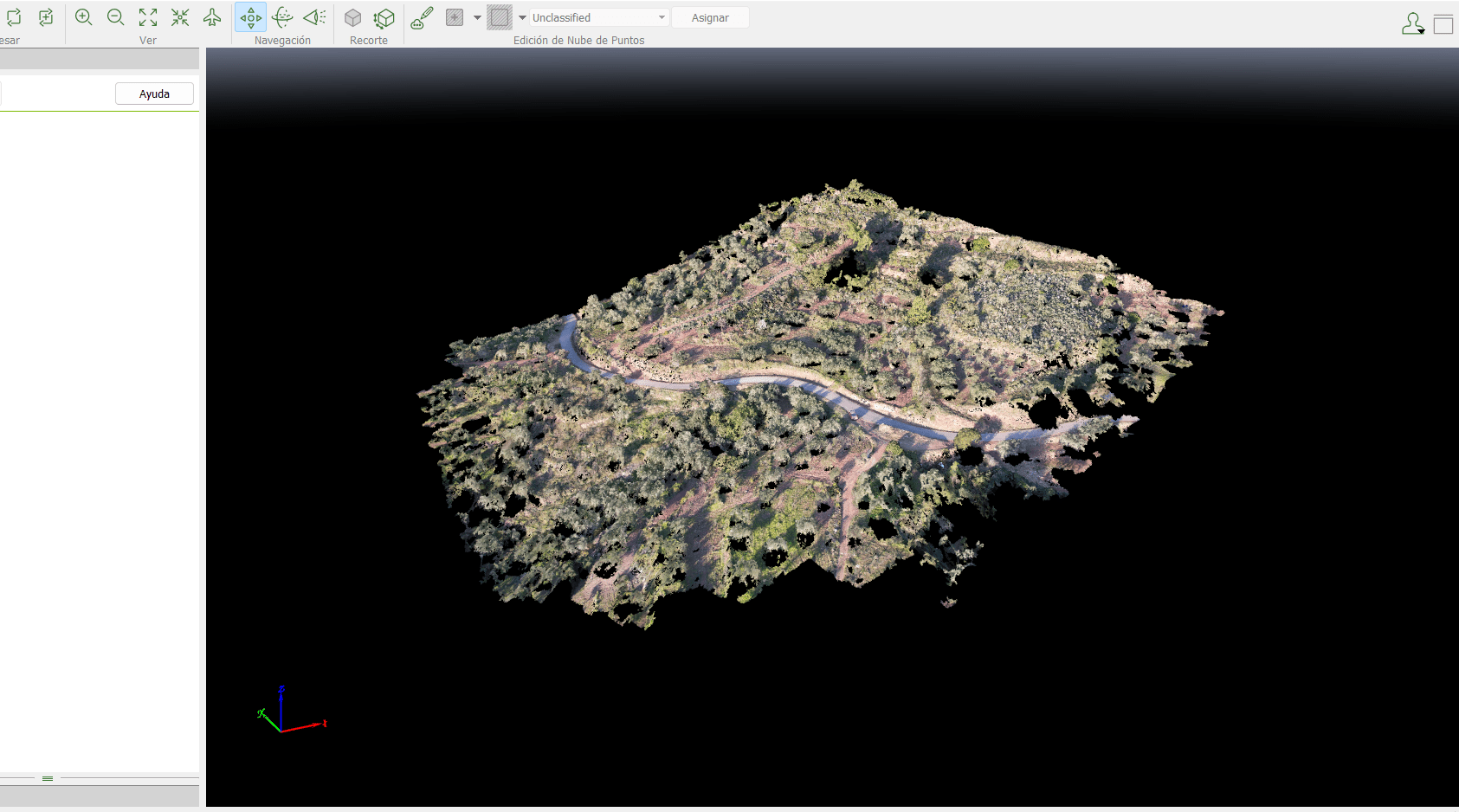
Alinea fotos, calcula posiciones y genera una nube inicial. - Point Cloud & Mesh.
Construye la nube de puntos densa y el modelo tridimensional. - DSM, DTM y Ortofoto.
Produce los entregables finales: ortomosaico, modelos de superficie y terreno.
Resultados obtenibles
Un proyecto bien ejecutado permite obtener:
- Ortofoto georreferenciada medible.
- Modelo 3D navegable.
- Nube de puntos.
- Curvas de nivel.
- DSM y DTM.
- Mediciones de superficies y volúmenes.
Para trabajos profesionales que requieran precisión real centimétrica, es recomendable usar puntos de control en tierra (GCPs) medidos con GPS de alta precisión.
Dronelink simplifica la fase más crítica: el vuelo. Pix4D aporta potencia y precisión en el procesado. Sin embargo, la calidad final depende sobre todo de cómo se capturan las imágenes. Un buen vuelo genera modelos fiables; un mal vuelo produce datos inútiles aunque se utilice el mejor software. La fotogrametría no es compleja, pero sí exige rigor técnico desde el primer clic hasta el último render.
